Today
is World IPv6 Day - and the Internet-Enabled Cat Feeder is open to the
public! Today
is World IPv6 Day - and the Internet-Enabled Cat Feeder is open to the
public!(as long as you've got IPv6 connectivity that is...) Today, the 8th June 2011, the Internet Society along with many
of the 'Internet giants', are taking part
in 'World IPv6 Day' - a first-of-its-kind event in the history of the
Internet that will enable a large scale testing of the 'new Internet
protocol', IPv6. The event will see a mass enabling of by those participating (content providers, transit providers, ISPs and end users) in order to give the protocol a run for its money to see what works, and of course what doesn't...
What's my contribution to this unique event? Well, in addition to taking part in a user trial of native IPv6 connectivity being provided by my ISP (Plusnet) I will also be opening up control of my cat feeder - the world's first to support IPv6 - to anyone that cares to give my cats a treat. Anyone, that is, that has IPv6 connectivity of course... ;-) Why? Good question... I could say it is to help demonstrate in a practical way how more and more devices are being hooked up to the Internet in such numbers that the dwindling pool of IPv4 addresses simply cannot hope to accomodate them, or that how such devices can be connected with relative ease given the lack of NAT configuration, port forwarding, etc. However, truth be told, it's just a bit of fun... and I'm sure our cats will appreciate it too! So, if you've got IPv6 and want to turn those extra IPv6 bits into bytes (oh please...) then click the link below! By the way, the whole purpose of today is to see what breaks so if that happens then, well, I'm only doing my bit... ;-) |
 |
Internet-Enabled Cat
Feeder - Mark 2 (The World's First (and Last?!) IPv6 Cat Feeder!) |
 |
 Ranked
#2 in Mac|Life Magazine's Top Ten Wonders of the Home
Automation World ! (Mar
'10, pp 30-31)
Ranked
#2 in Mac|Life Magazine's Top Ten Wonders of the Home
Automation World ! (Mar
'10, pp 30-31)
 |

(Click
photos to see larger versions. Full-size originals available on
request)
|
 |
 |

|
|
   
  |
||
 Flapper - Left View |
 Dispenser |
 Flapper - Right View |
 Shaft - Top View |
 Shaft Drawing |
 Shaft - Bottom View |
 Splitter - Side View |
 Splitter - Top View |
 Splitter - In Situ |
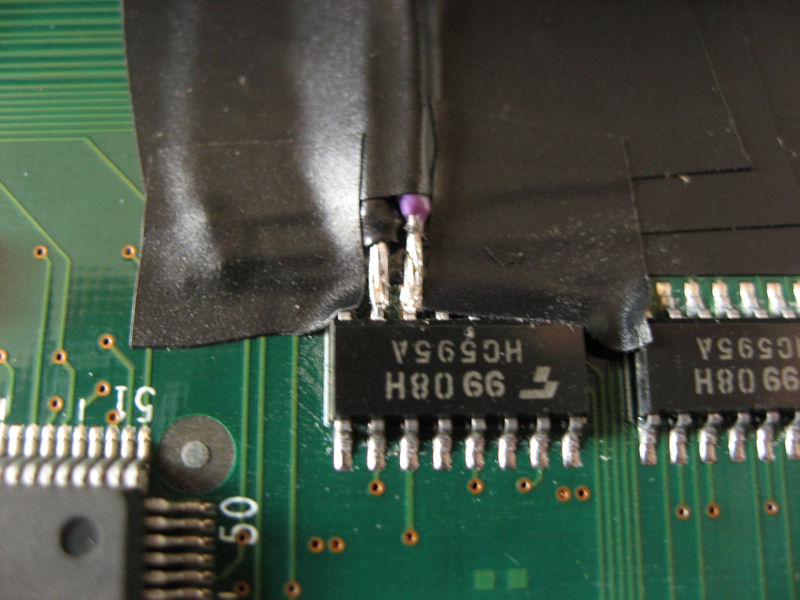
 HC595A Shift Registers |
 LED Driver Output for Port 20 |
 LED Driver Output for Ports 21 and 22 |
 Power Cable Soldered Underneath |
 Ground Obtained from Chassis Screw |
 Completed Wiring |
 Terminal Block for External Connections |
 RJ45 Loopback Adapters |
 Linksys WRT54GL Router - 'Pre Op' |
 Case Dismantling (Screwless) |
 Router Innards |
 PCB Removed from Case |
 +12v (Top) and GND (Bottom) Connection Points |
 White LED (Left) and Orange LED (Right) Connection Points |
 DMZ LED Connection Point |
 Completed Wiring (Looped through holes for strain relief) |
 Pre-rebuild
Testing
|
 External
LED View
|
 Mounted on
Rear of Feeder
|
 External Connections |
 Circuit Schematic (PDF) |
Mounted Control Board |
 Standard Web Interface |
Mobile 'Lite' Version |
Later Revision (created for World IPv6 Day) |
 IP Camera (It was later mounted on the feeder itself) |
 Motion
Detection 'Zones'
|
 Zone Configuration |